Accepted at IROS 2026
Click-to-Model: Real-Time Interactive Object Modeling & Robust 6D Pose Tracking
Core Developer · 3rd Author
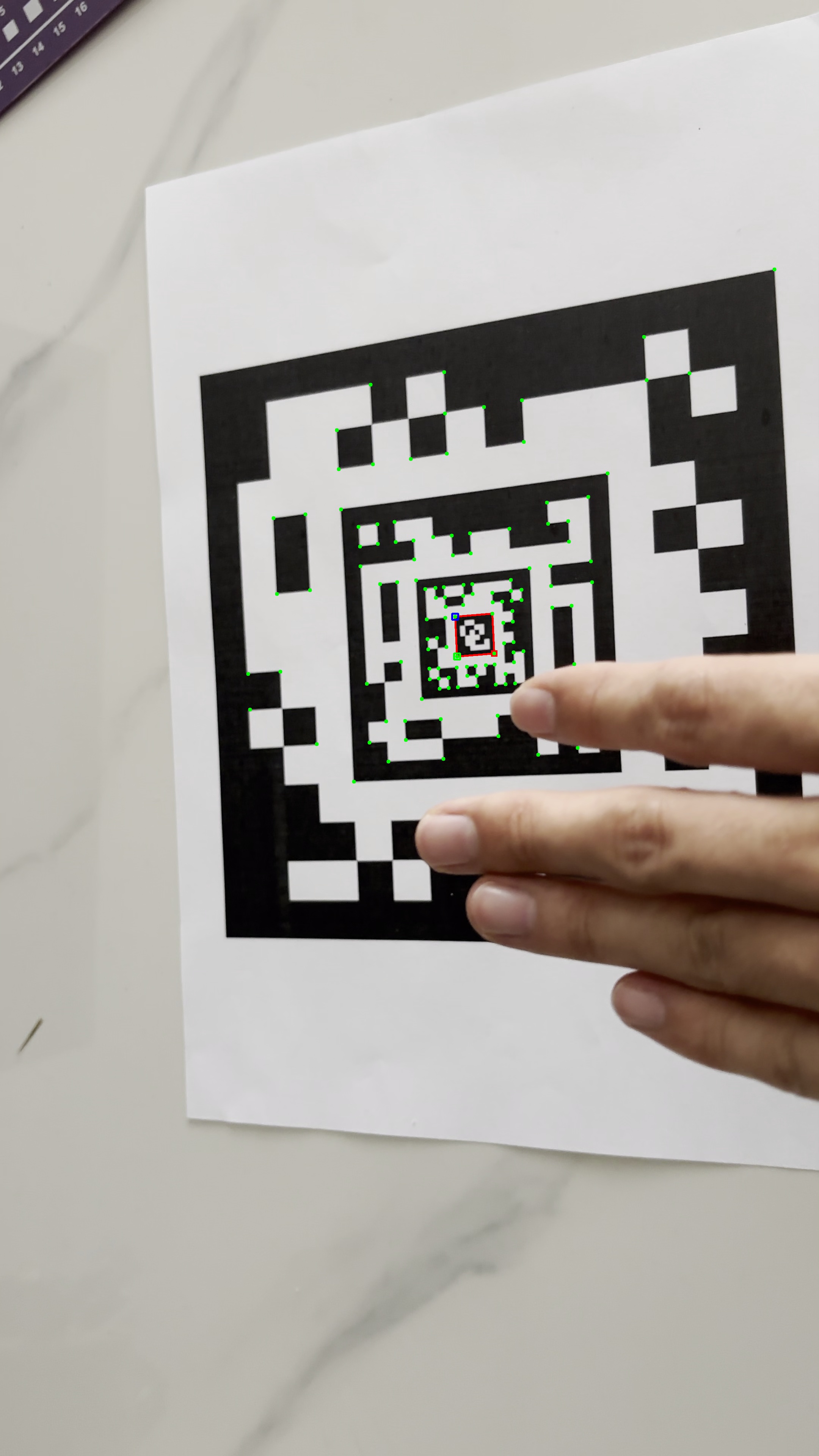
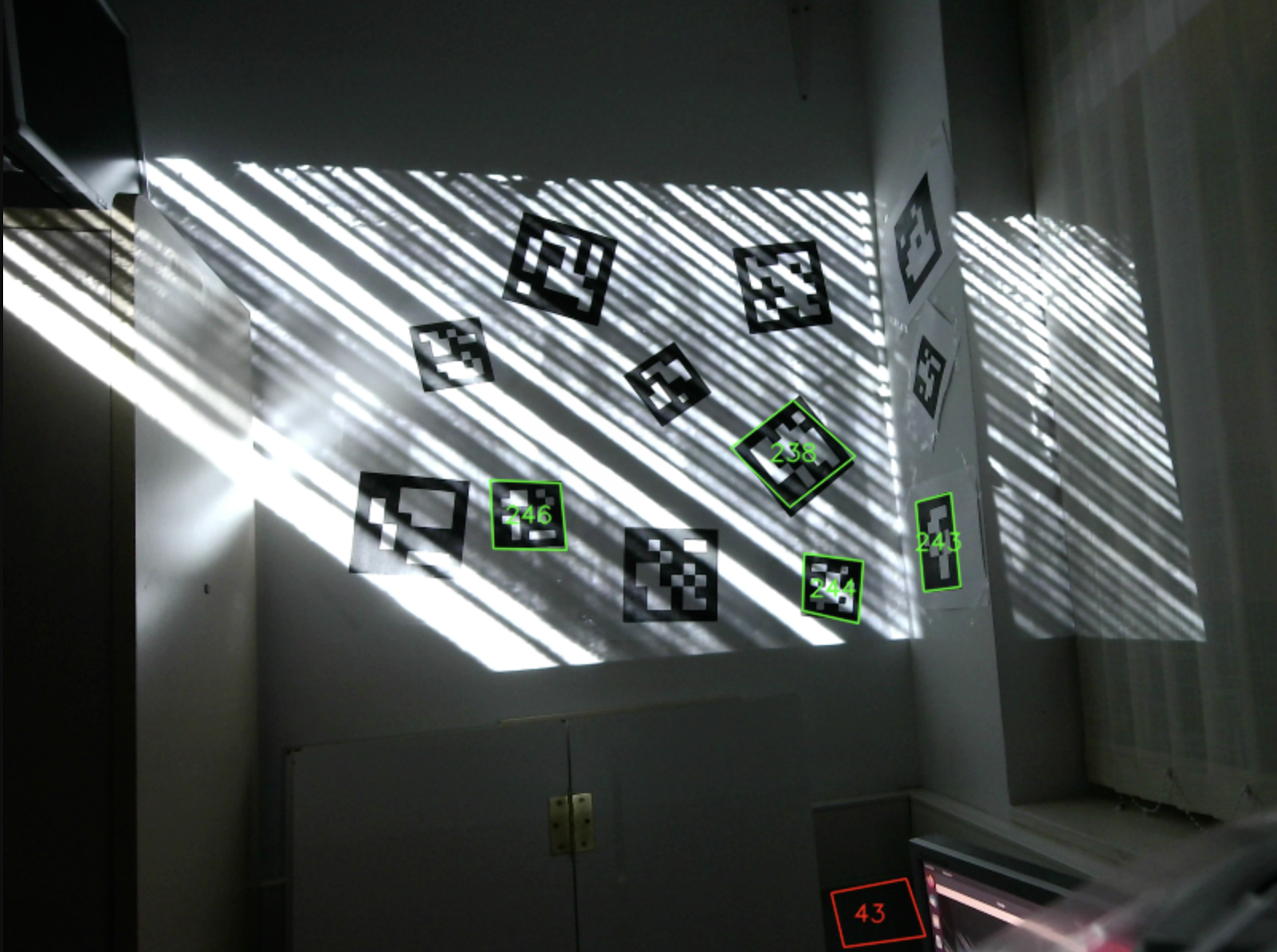
End-to-end interactive perception for unseen objects — no CAD needed. One click reconstructs a metric-scale 3D model and tracks 6D pose in real time (color–shape particle scale recovery + FoundationPose/ICP), reaching ADD(-S) 0.95 and 96% RSR (baselines: 0) at 19 FPS.
PyTorch6D Pose EstimationFoundationPoseSAM3DOpenCVROS